CRootBox
Root modelling made easy
Discover CRootBox Try it online Root architecture parameter databaseRoot modelling made easy
Discover CRootBox Try it online Root architecture parameter database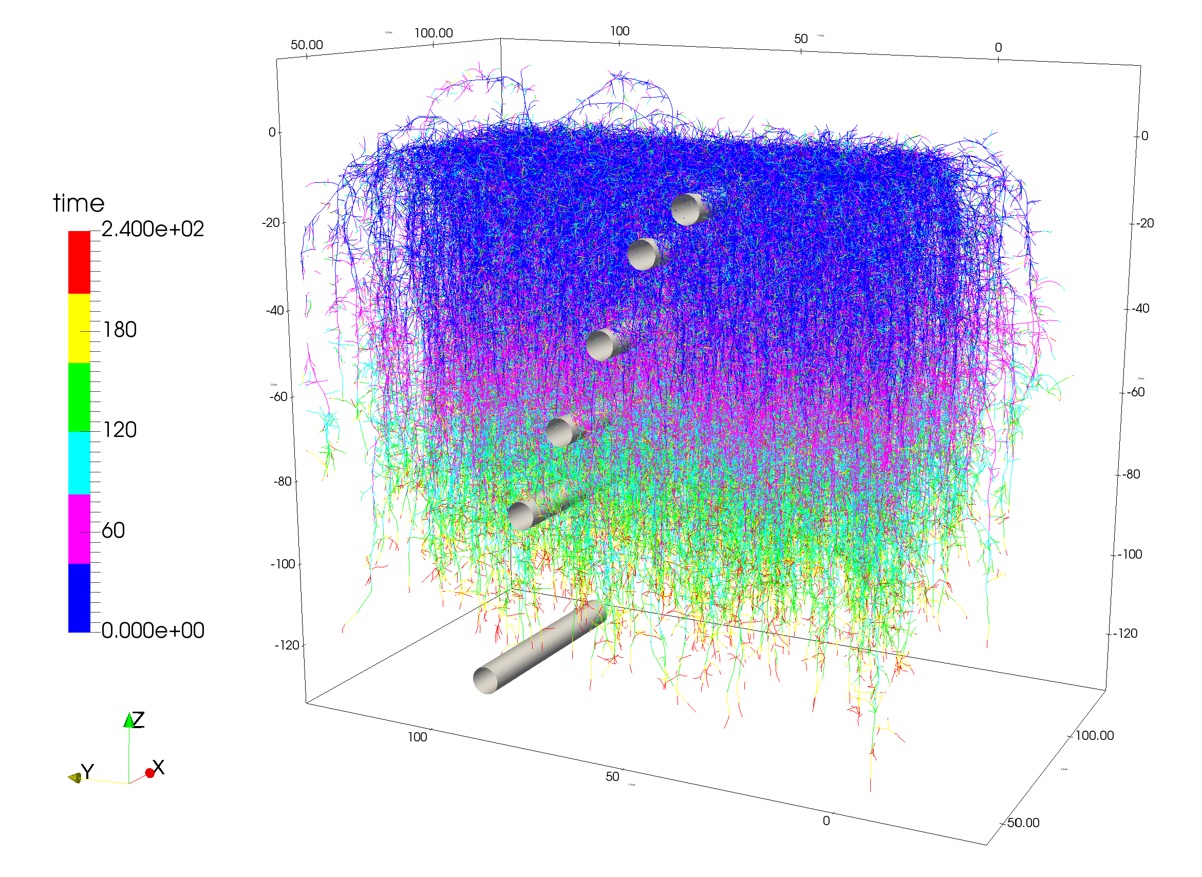
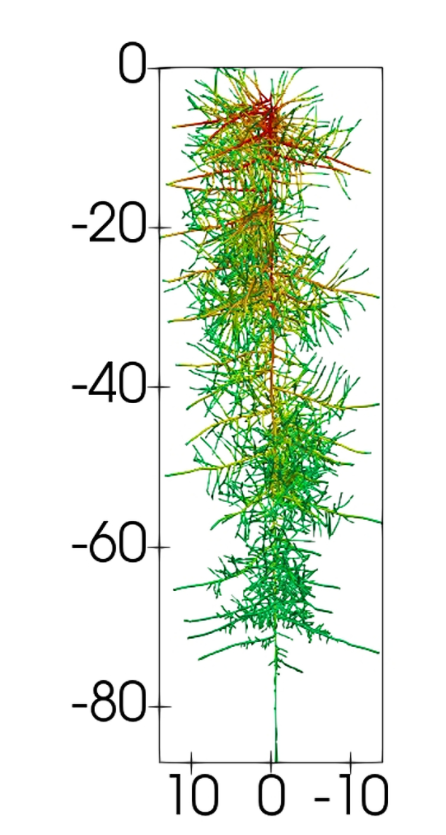
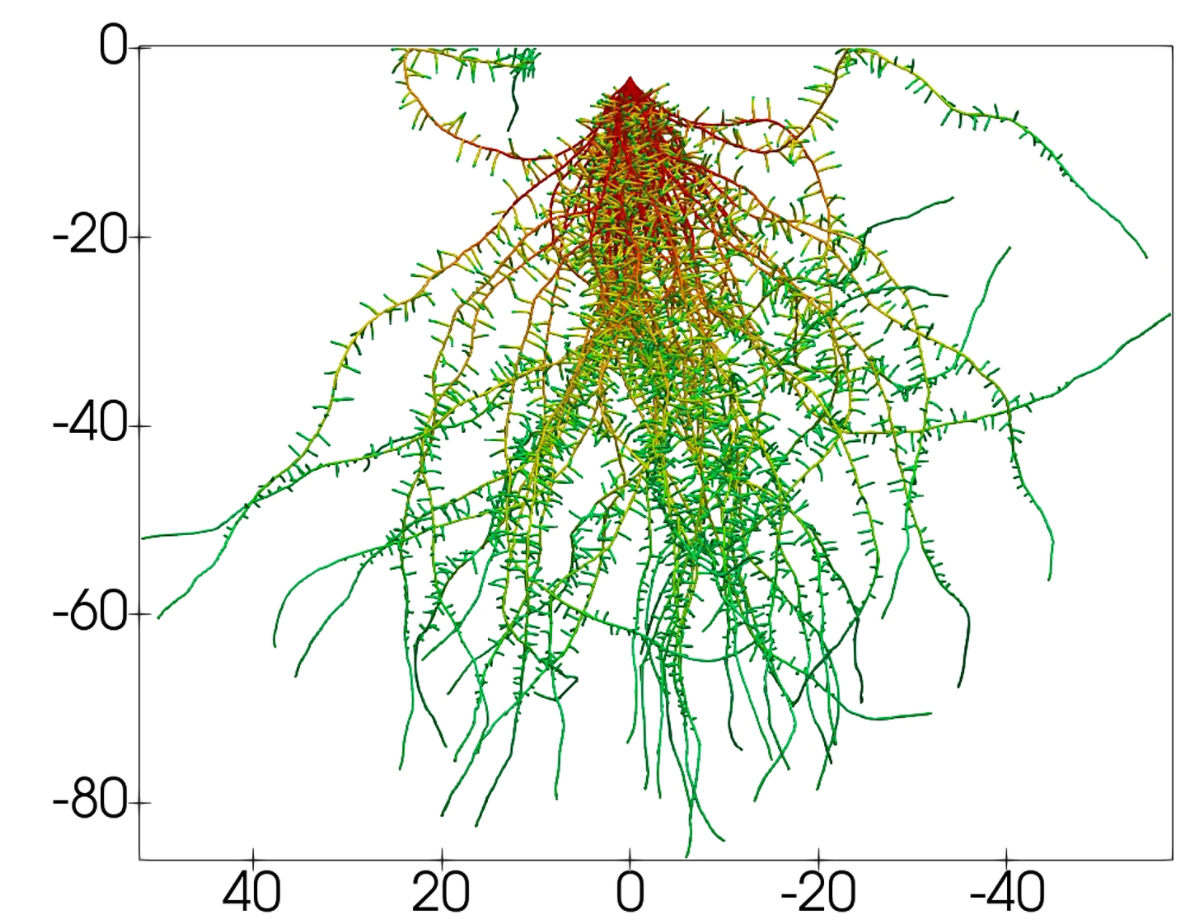
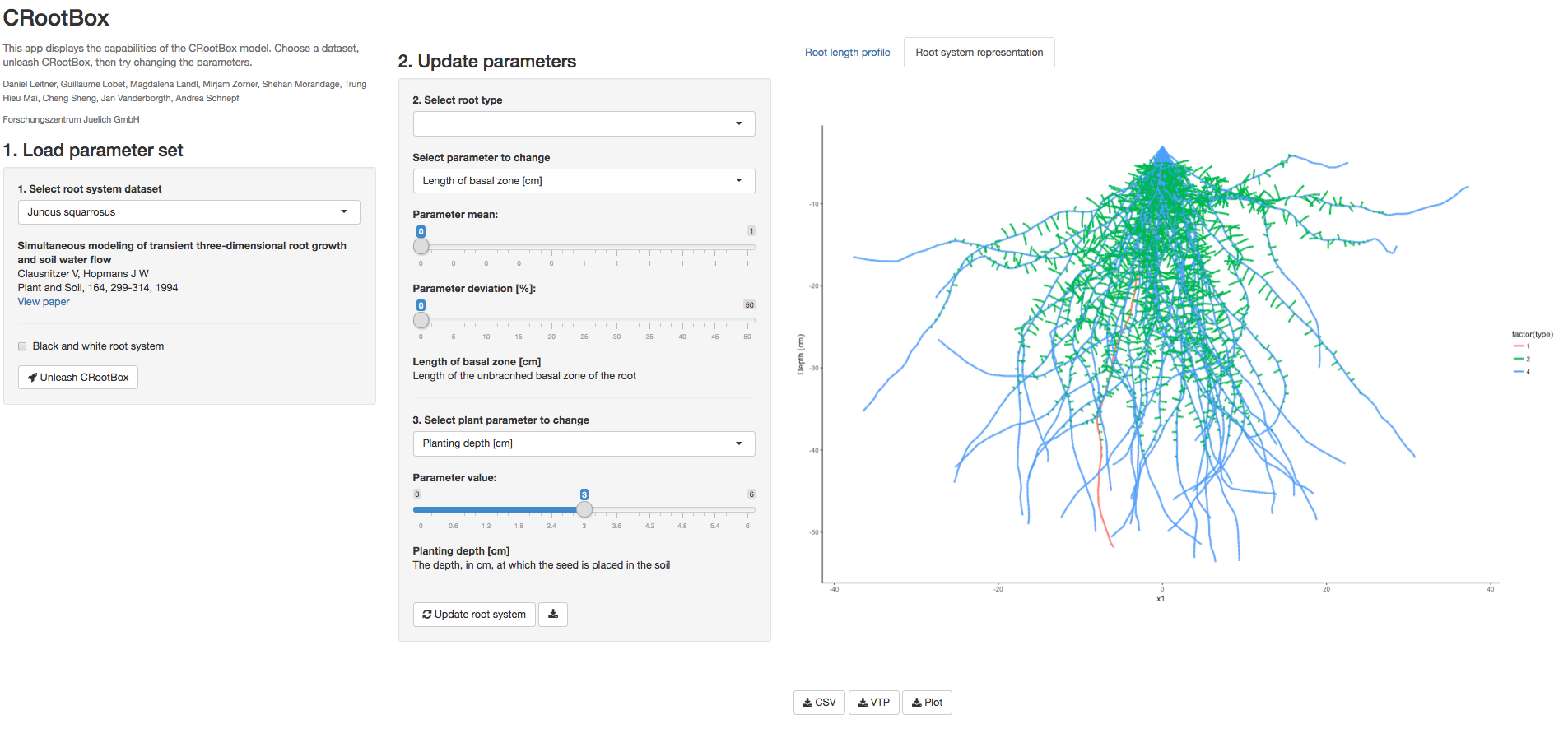
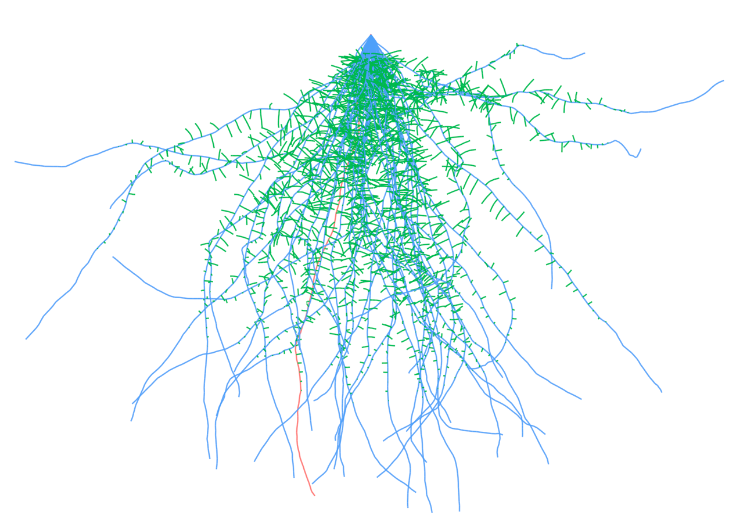
The focus of CRootBox is the simulation of different types of root architecture, and to provide a generic interface for coupling with arbitrary soil/environmental models, e.g., in order to determine the impact of specific root architectures on function. CRootBox is based on the earlier RootBox code that had been implemented in Matlab (Leitner et al. 2010), but now has an object oriented implementation which is more flexible and faster so that field-scale modelling became feasible.
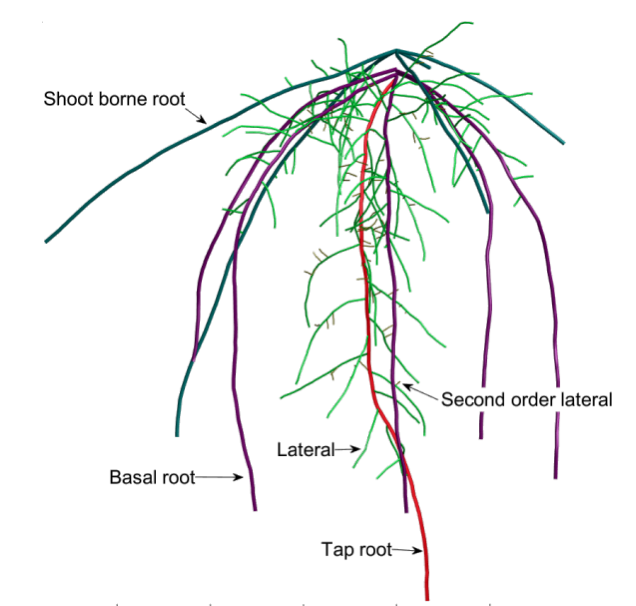
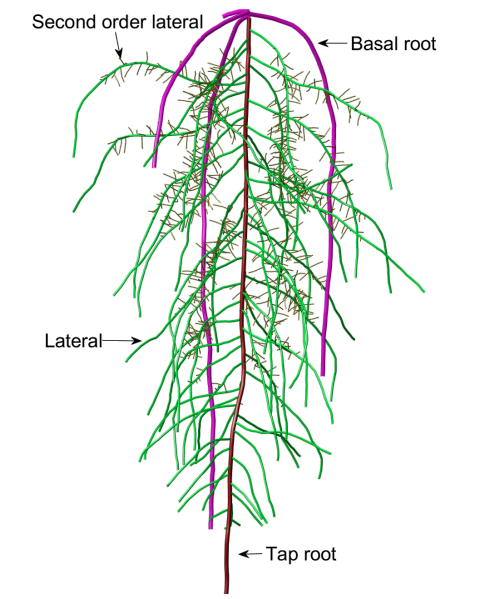
Based on published data, we created a database of root architectural parameters, simulated all of them using CRootBox (with adapted parameters where necessary) in a setting of a single root system growing in unconfined space. All the parameter files can be found here
The root growth modelling in containers based on signed distance functions allows to mimic experiments that use specific containers, also split-root boxes, and it also works to simulate root growth around obstacles. It may for example be helpful to anticipate wall effects in a given container size.
CRootBox was designed to be connected to a suite of other tools such as: